|
| ワーク:果物(皮をむいた) ロボット先端に搭載したロボットハンドで果物(皮をむいた)を真空吸着し搬送します。ロボットハンドの主要材質はステンレス(SUS303)です。柔らかい果物を傷つけない工夫が吸着パッド(21.018.013.2/28)に施されています。 |
|
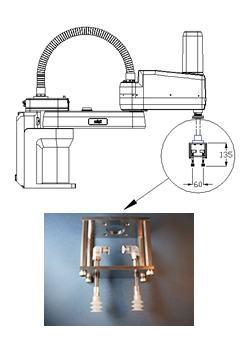
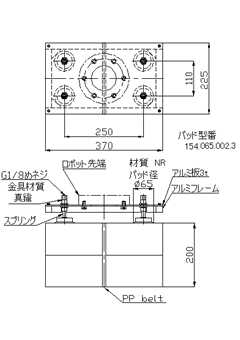
| ワーク:ダンボール箱 ベルトで結合されたダンボール箱を真空搬送するロボットハンドです。ダンボールにシワを発生しにくくするため薄物用パッド(154.064.002.3)を選択しました。 薄物用パッドは、柔らかい材料(天然ゴム 硬度40度)を使用しているため薄物ワークの真空吸着に適しています。 |
|
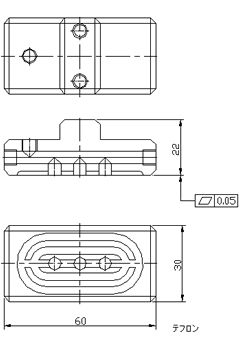
| ワーク:ウエハ この吸着治具はテフロン製です。ウエハを真空搬送します。この吸着治具では、平面度、平行度が重要です。 |
|
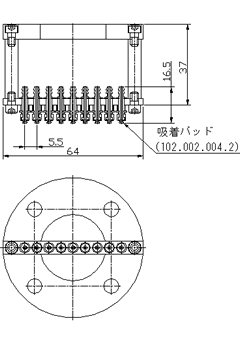
| ワーク:微小機械部品 狭いピッチで並んだ微小機械部品を9個同時に真空吸着し搬送します。吸着パッドのピッチは5.5mmです。吸着パッドは、Φ2フラットパッド(102.002.004.2)を使用しています。 |
|
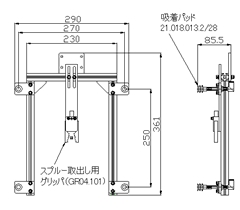
| ワーク:プラスチック成形品 金型からプラスチック成形品を取出す用途に使用されます。スプルーをつかむセンサ付グリッパ(GR04.101)が中央に付いています。このセンサ付グリッパ(GR04.101)は、特長ある構造をしているためスプルーの有無検知が確実に行えます。 また吸着パッド位置は移動でき、段取替に対応できます。 |
ロボットハンド設計例